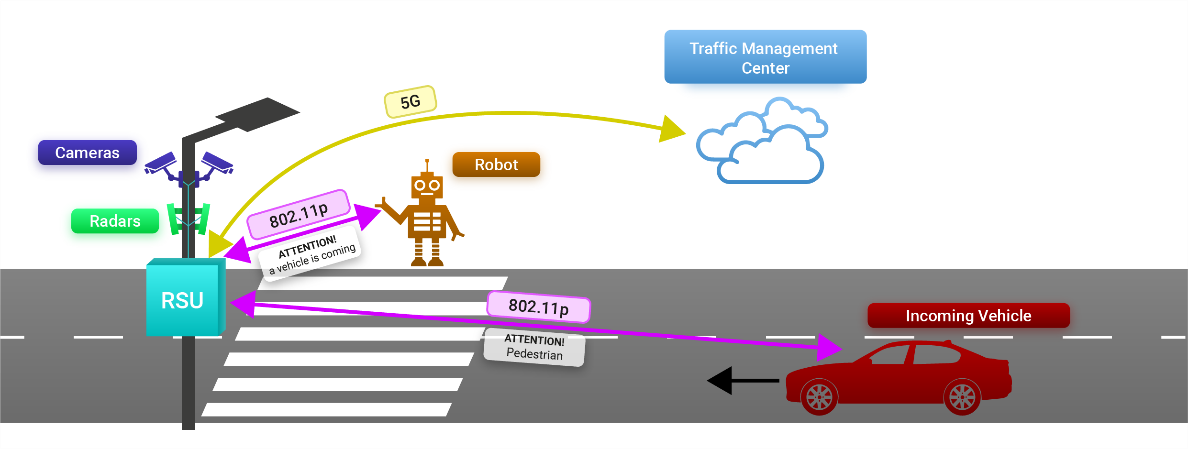
IFR forecasts and the conducted literature analysis prove that part of the research should be focused on adapting the companion robot to moving around in open space in external conditions. There is a visible interest in the use of robotic devices in the care and assistance of the elderly or disabled people. However, the external environment still contains many obstacles and barriers. According to the authors, the solution to some of the problems related to movement in outdoor conditions would be to communicate the companion robot with the road infrastructure, inter alia, via IoRT (Internet of Robotic Things). This is why the purpose of this article is to present the concept of communication of the companion robot with the road infrastructure.