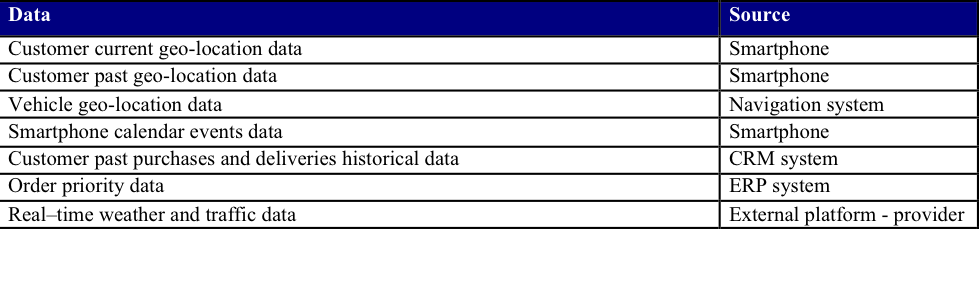
Purpose: Technological evolvement creates new business opportunities such as the optimization of distribution networks by using big data to calculate optimal delivery routes respecting individual time windows. The optimized network enhances firms to improve customer satisfaction, reduce delivery costs, and increase the utilization of the truck load by integrating reverse flows.Methodology: Following the design science approach, available data and relevant scientific theories are firstly reviewed and evaluated. Subsequently, functional, non-functional requirements and system design are analyzed. In specific, the prototype is designed, implemented, and evaluated; especially the fulfillment degree of its goals and requirements.Findings: The results of this research indicate that several tradeoffs have to be faced against the optimal use and analysis of available data, in order to provide a prototype that aims at improving customer satisfaction and reducing distribution costs at the same time.Originality: We implement a prototypical information system to realize the optimized distribution network. The prototype consists of a mobile user-app and a back-office-system. Major functionalities of the prototype include the data analysis and the specification of settings for the desired delivery times and locations being actively influenced by the parcel recipients.Limitations: Due to the results, the focus has been laid on the analysis of dedicated, user-defined delivery time and location time windows. Therefore, a customized heuristic approach is developed in order to decrease the complexity of the distribution process. We simulated the results, while a field study would enhance more insights.Managerial Implications: Practitioners can use the prototype to reduce their transportation costs, to improve the utilization of the truck load, or for new city services such as same day deliveries. IntroductionDelivery of parcels has been part of everyday life of the population over the last decades. Especially due to the evolution of online retail activities over the last 15 years, millions of parcels are distributed worldwide (Fang and Zhang, 2005). However, it is commonly observed that there is a lack of coordination between the delivery schedules of the logistics companies and the schedules of the recipients (Engel et al., 2014). When a parcel is delivered, its recipient may sometimes not be present at the delivery location. This results from, either the recipient’s unawareness about the delivery time in advance. However, even in a few cases, where logistics companies provide a 3-hour time range of estimated delivery in advance, the recipient may still not be able to be present at the delivery location and receive his parcel. In consequence, we have a need to optimize distribution networks (Shekhar et al., 2012, Valerio et al., 2009, Waller and Fawcett, 2013). This phenomenon is enhanced by the rapid increase of the percentage of single-person households, as well as of the amount of employed members in families (Nations, 2000).This situation is primarily a problem for the logistics companies. Due to the heavy increase of parcels, ordered from online retailers, as well as the extra delivery attempts, the following problems have risen: Firstly, time and resources are wasted and distribution costs increase; trying to reach absent recipients and their neighbors subsequently. Additionally, the extra distribution routes lead to increased exhaust emissions, which are harmful for the environment. Furthermore, in order to decrease operational and distribution costs, the logistics companies provide their employees with insufficient working conditions and low salaries. Moreover, the most significant challenge for these companies, originating from the problematic situation described above, is, that their customer base lacks of customer satisfaction, as the current services that are offered do not meet their needs and requirements in the desired degree (Weltevreden, 2008, Fang and Zhang, 2005).Despite all the problems, logistics companies have not made radical changes on their distribution processes. However, observing the evolution of online retail activities (Fang and Zhang, 2005) and the estimated increase of the internet users globally (Stats, 2013), these problems are expected to become more intense. Therefore, customer-oriented adjustments are needed. Customers need to have more delivery options considering their personal needs and schedule. They need high quality services, which let them choose whether their order is delivered at one of their addresses (work or home), at a parcel station, or even at a family member, a friend or a person of trust and moreover, the need to be able to combine those options for a single delivery, by specifying a time window for each one of them (Shekhar et al., 2012, Valerio et al., 2009, Waller and Fawcett, 2013). Such services would significantly contribute to the enhancement of customer satisfaction, which constitutes the major common goal of the supply chain partners, as well as to the optimization of distribution logistics processes.Along with the evolvement of new technologies, such as real-time processing of huge data volumes new opportunities arise in the area of distribution logistics (Engel et al., 2014, Sadovskyi et al., 2014). The necessary data can be provided by the supply chain partners and originating from different sources (e.g. upstream and downstream inventory information, current and past geo-positions, traffic and weather information, sensor information, historical data etc.). Moreover, focusing on the distribution logistics field, a customer-oriented approach is vital for any organization’s success (Monczka et al., 2008, Waller and Fawcett, 2013), considering the customer dynamism evolvement over the last years. Motivated by the steady increase of online retail activities (Fang and Zhang, 2005), we propose a novel approach as well as a prototypical solution to improve customer satisfaction avoiding unnecessary delivery attempts through real-time calculation of optimal delivery routes that take into account the current availability of the recipient.Related WorkA related concept has been described by Engel et al. (2014), proposing the development of a dedicated smartphone application, in order to use data from the customer’s personal calendar and the GPS sensor, which operate on the smartphone, as source of his prospective location. Furthermore, the use of real-time information about weather, traffic and current location of the distribution vehicle is recommended. However, there is no optimization process until this last step of the supply chain, after the parcels have been loaded on the distribution vehicles. In order to provide a more effective solution for the problem described above, we have developed our prototype based on the work of Engel et al. (2014). The prototype aims at optimizing distribution logistics using big data, consisting of a dedicated smartphone application and a back-end system.Conceptual ApproachConsidering the proposed distribution process by Engel et al. (2014), the following data sources have to be used for smarter routing of distribution vehicles: Customer geo-location (current and past), distribution vehicle geo-location, schedule of the customer (smartphone calendar events), past purchases and deliveries historical data from customers, order priority data, and real–time weather and traffic data. For the development of the prototype, it is necessary to evaluate the data sources based on criteria like information security, complexity, and usability.Customer current geo-location dataCustomer current geo-location can be tracked from the app using the GPS sensor of the smartphone in the following format: a pair of decimal values, representing the current location’s latitude and longitude. Considering that a user potentially faces privacy violation and information security issues by providing personal information and data, user’s current geo-location should be optional and not be used in key functionalities like the initial route calculation or the creation of user’s time windows.However, the customer´s geo-location can be used for the detection of a delivery plan divergence. The app will detect right before the delivery time, if the user is located further than a specified distance away from the delivery address, in case it would not be possible to cover this distance at the planned delivery time. Then the system will recalculate vehicle routes, as it is described in the concept and requirements of the prototype. In addition, customer current geo-location data should only be analyzed in the app, and not be stored or transferred to the server. Further, there are no data size or complexity issues that should be taken into consideration.Customer past geo-location dataDistribution logistics could be further optimized by the analysis of customer past geo-location data. For example, the system can predict customer’s future location, recognize patterns, and habits that could be used for route calculation along with user-defined time windows etc. using big data analysis techniques. While this allows firms to increase the efficiency, the complexity increases. In addition, customer past geo-location analysis would require permanent storage of this data raising the same information security issues as described above. As this would be in discrepancy with the decisions taken about customer current geo-location data, we neglected to use customer past geo-locations data at all.Vehicle geo-location dataGeo-location data can be used for optimization being provided by the navigation system of the distribution vehicle’s, e.g. its current location. This data can be analyzed in real time, as well as stored and aggregated for later analysis being beneficial for the estimation of the delivery time or route recalculation processes.However, navigation systems are not provided in the context of this prototype, so there is no opportunity to integrate vehicle geo-location data. While the possibility of generating geo-location test data has been considered in order to integrate this functionality, it would be very difficult to assure that this data is realistic enough to meet evaluation requirements. In addition, it would make the testing phase too complicated, particularly in case of a real time geo-location analysis. That is the reason for our decision to exclude the vehicle geo-location data from the prototype. Despite that, the usage of geo-location data is recommended for the final product.Smartphone calendar event-dataIn order to be able to create time windows for the route, the user’s preferred delivery addresses and calendar events are needed being accessible via the customer´s smartphone. However, there are plenty of reasons why smartphone calendar events’ data do not meet evaluation criteria such as missing start and end time or the event’s location. Finally, users are probably not willing to share their personal calendar events, due to information security and privacy violation issues. Therefore, we exclude the direct access to customer´s calendar data from our prototype. Instead, we use a platform with an interface allowing firms to harmonize time-window wishes from customers with the distribution route. This allows us to ensure that every time window has a start and an end time, a delivery location is chosen, and the existence of uniform data format.Customer past purchases and deliveries historical dataThe next data category to be evaluated is order-specific data. Originating from their Data Warehouse and Customer Relationship Management (CRM) systems, companies in the distribution logistics branch have data available suitable for optimizing distribution logistic networks. As our prototype is not developed in collaboration with one of those companies, it is very complex to generate and analyze realistic such data in order to evaluate the effectiveness of the prototype.As long as delivery time windows and addresses are exclusively created by the customers based on their schedule, there is no need for historical data integration in this process. In case of a delivery plan divergence, when the time windows data are not sufficient for a successful delivery, historical data will be used, regarding successful and unsuccessful deliveries in specific time slots in the past.Order priority dataDue to mathematical constraints, there is a need for sorting the orders at several steps of the distribution algorithm (see chapter 4). Furthermore, orders that match certain situation-based criteria shall be given priority. For example, (1) the customer has paid an extra fee for an early/next day delivery service, (2) the order contains food, beverages, or medicines, (3) the order has already been unsuccessfully delivered, or (4) the order contains fragile products or products of high value. This allows firms to differentiate their business model according to their needs.The values of this criteria are either boolean or scalar integers and the total priority is calculated as a decimal number with the weighted arithmetic mean method. For the context of this research, decimal values between 0 and 5 where generated, with 5 indicating the highest priority and 0 the lowest. Real–time weather and traffic dataAnother idea for optimizing distribution logistics is to include real-time weather and traffic data into the route calculation process. By that, streets with high current traffic, due to bad weather conditions, accidents, or roads under construction, may be avoided; or at least delivery delays can be detected, estimated and taken into consideration. However, there is always the challenge to balance the need for computation power and needed complexity when using such data.Google Maps API supports real-time weather and traffic data, but not in the free edition used for developing this prototype (Google, 2014). This fact prohibited the use of such data. However, if the prototype is further developed in the future in order to be launched in the market, there will be the need to use the commercial version of Google Maps API, where real–time weather and traffic data is fully integrated. Figure 1 provides and overview of used data and the source of the data proposing its relevance for the prototype.

/26B4DA64-6ABC-45A2-996E5C9062549ABF (1).png?1497452011)